 三维计算几何基础
三维计算几何基础
# 三维计算几何基础
# 定义
struct Point3{
double x,y,z;
Point3(double x=0,double y=0,double z=0):x(x),y(y),z(z){}
};
typedef Point3 Vector3;
1
2
3
4
5
2
3
4
5
# 基本运算
Vector3 operator +(Vector3 A,Vector3 B){return Vector3(A.x+B.x,A.y+B.y,A.z+B.z);}
Vector3 operator -(Point3 A,Point3 B){return Vector3(A.x-B.x,A.y-B.y,A.z-B.z);}
Vector3 operator *(Vector3 A,double p){return Vector3(A.x*p,A.y*p,A.z*p);}
Vector3 operator /(Vector3 A,double p){return Vector3(A.x/p,A.y/p,A.z/p);}
1
2
3
4
2
3
4
直线的表示,可以用参数方程 (点和向量)来表示,射线和线段可以看成”参数由取值范围限制的“的直线
平面的表示,用点法式 , 其中 是平面上的一个点,向量 是平面的法向量。每个平面把空间分成了两个部分,我们用点法式表示其中一个半空间,是法向量所背离的哪一个。 垂直于平面上的所有直线。平面上任意点 满足 。设 的坐标为 , 的坐标为 ,向量 的坐标表示为 上述等式等价于
整理得: 如果令 ,就得到了平面的一般式
当 上述点积大于 ,即点 在半平面空间 外。换句话说 表示的是以一个半空间
# 点积
double dot(Vector3 A, Vector3 B) { return A.x * B.x + A.y * B.y + A.z * B.z; }
1
# 长度
double length(Vector3 A) { return sqrt(dot(A, A)); }
1
# 向量夹角
double angle(Vector3 A, Vector3 B) { return acos(dot(A, B) / length(A) / length(B)); }
1
# 叉积
三维叉积的结果是一个向量
叉积同时垂直于 和 ,方向遵循右手定则。当且仅当 和 平行时,叉积为
Vector3 cross(Vector3 A, Vector3 B) {
return Vector3(A.y * B.z - A.z * B.y, A.z * B.x - A.x * B.z, A.x * B.y - A.y * B.x);
}
1
2
3
2
3
通过向量叉积,可以进行一些拓展的基础问题。
过不共线的三点的平面,法向量为 ,任取一个点即可得到平面的点法式。
# 三角形的有向面积的两倍
double area2(Point3 A, Point3 B, Point3 C) { return length(cross(B - A, C - A)); }
1
# 点、线、面
# 点到直线的距离
double distance_to_line(Point3 p, Point3 p0, Vector3 v) {
return length(cross(p - p0, v)) / length(v);
}
1
2
3
2
3
# 点在直线上的投影
Point3 line_projection(Point3 p, Point3 p0, Vector3 v) {
return p0 + v * dot(p - p0, v) / dot(v, v);
}
1
2
3
2
3
# 点到平面的距离
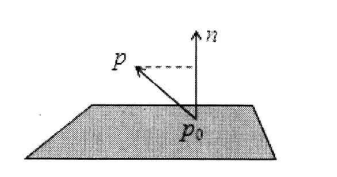
把 投影到向量 上可得 : 到平面的有向距离为 。
double distance_to_plane(Point3 p, Point3 p0, Vector3 n) {
return fabs(dot(p - p0, n) / length(n));
} //点 p 到平面 p0-n 的距离,如果不取绝对值,得到的是有向距离
1
2
3
2
3
# 点在平面上的投影点
设 在平面 上的投影为 则 平行于 ,且 其中 为 到平面的的有向距离
Point3 plane_projection(Point3 p, Point3 p0, Vector3 n) {
return p - n * dot(p - p0, n) / length(n);
}
1
2
3
2
3
# 直线和直线的交点
Point3 line_intersection(Point3 p, Vector3 v, Point3 q, Vector3 w) {
Vector3 u = p - q;
double t = length(cross(w, u)) / length(cross(v, w));
return p + v * t;
}
1
2
3
4
5
2
3
4
5
# 直线和平面的交点
设平面方程为 ,过点 和 的直线的参数方程为 ,则与平面方程联立解得
如果分母为 则直线和平面平行,或者直线在平面上
如果平面用一般式 ,则联立出来的表达式为
Point3 line_plane_intersection(Point3 p, Vector3 v, Point3 p0, Vector3 n) {
Vector3 u = p - p0;
double t = dot(n, u) / dot(n, v);
return p - v * t;
}
1
2
3
4
5
2
3
4
5
# 体
# 四面体的体积
已知 个顶点为
double volume6(Point3 A, Point3 B, Point3 C, Point3 D) {
return dot(D - A, cross(B - A, C - A));
}
1
2
3
2
3
上次更新: 2025/04/08, 18:03:31